
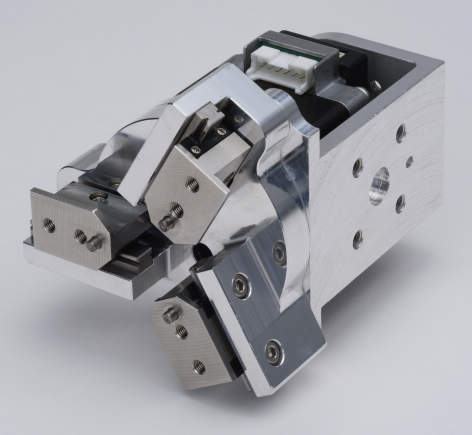
・高精度の把持力制御・速度制御・位置制御が可能。
・変形しやすいワークのピックアップが可能。
・ワークの大きさの検出やワークの落下検出も可能
・カム機構による小型、軽量設計により、ロボットアーム等の多面取り付けが可能
ミネベアミツミ
モノづくりの困ったを解決する総合サイト

ミネベアミツミ
・高精度の把持力制御・速度制御・位置制御が可能。
・変形しやすいワークのピックアップが可能。
・ワークの大きさの検出やワークの落下検出も可能
・カム機構による小型、軽量設計により、ロボットアーム等の多面取り付けが可能
製品についてのご質問やお困りごとなどお気軽にご相談ください!
![]()
![]()
1952年設立で、動力伝導機器・産業機器・制御機器等の機械設備及び機械器具関連製品の販売をしている専門総合商社です。
日本国内で40以上の拠点を持ち、信頼性の高い製品と技術力で、全国のものづくりに携わる方々のあらゆるお困りごとを解決しています。




