ロボット導入に最適!人に優しい協働ロボットです。
不二越の新しいCZ10はヒトにやさしい機能、構造を満載。
ロボット導入のハードルを下げ、様々な用途で適用します。
【ヒトとの接触で安全に停止】
接触を検知したら、停止
【ヒトの手でカンタン教示】
アームを手で動かし、直感的にティーチングが可能
【ヒトにやさしいデザイン】
関節には隙間を持ち、アームには丸みを持たせた、ヒトにやさしいデザイン
共通仕様
| 型式 | CZ10-01 |
|---|---|
| 自由度 | 6 |
| 駆動方式 | ACサーボ方式 |
| 最大動作範囲 | ・J1:±2.96rad(±170°) ・J2:-1.30~+3.92rad(-75~+225°) ・J3:-1.34~+3.96rad(-77=+227°) ・J4:±3.14rad(±180°) ・J5:±2.96rad(±170°) ・J6:±6.28rad(±360°) |
| 最大速度 | ・J1:2.09rad/s(120°/s) ・J2:2.09rad/s(120°/s) ・J3:3.14rad/s(180°/s) ・J4:3.14rad/s(180°/s) ・J5:3.14rad/s(180°/s) ・J6:3.14rad/s(180°/s) |
| 可搬質量 手首部 | 10kg |
| 手首許容静負荷トルク | ・J4:25.9N・m ・J5:25.9N・m ・J6:5.9N・m |
| 手首許容最大慣性モーメント | ・J4:0.75kg・m2 ・J5:0.75kg・m2 ・J6:0.08kg・m2 |
| 位置繰り返し精度 | ±0.1mm |
| 最大リーチ | 1300mm |
| エアー配管 | φ4×1 |
| アプリケーション信号線 | DI×4,DO×3 |
| 設置方法 | 床置/天吊 |
| 設置条件 | ・周囲温度:0~45℃ ・周囲湿度:20~85%RH(結露なきこと) ・据付面への許容振動:0.5G(4.9m/s 2 )以下 |
| 耐環境性 | IP54相当(防塵・防滴) |
| 本体質量 | 61kg |
| 安全認証 | ・ISO 10218-1準拠 ・TS 15066準拠 |
-
![産業用ロボット特集]()
このようなお困りごとはありませんか?
■「ロボットのラインナップが多くて何が適しているか分からない」
■「ロボットの操作が不慣れなため導入が難しそう]
■「省人化の為にロボットを導入したいが、スペースがない」
■「ロボットティーチング、プログラムが出来るか不安」
■「ロボットを導入して生産性が落ちないか不安」省人化に最適な小型・汎用ロボットの選定、お手伝いさせて頂きます!
産業用ロボットは、低価格化や小型化が進んできたことや、協働ロボットが普及してきたこともあり、幅広い分野の工場での導入実績が増えてきました。
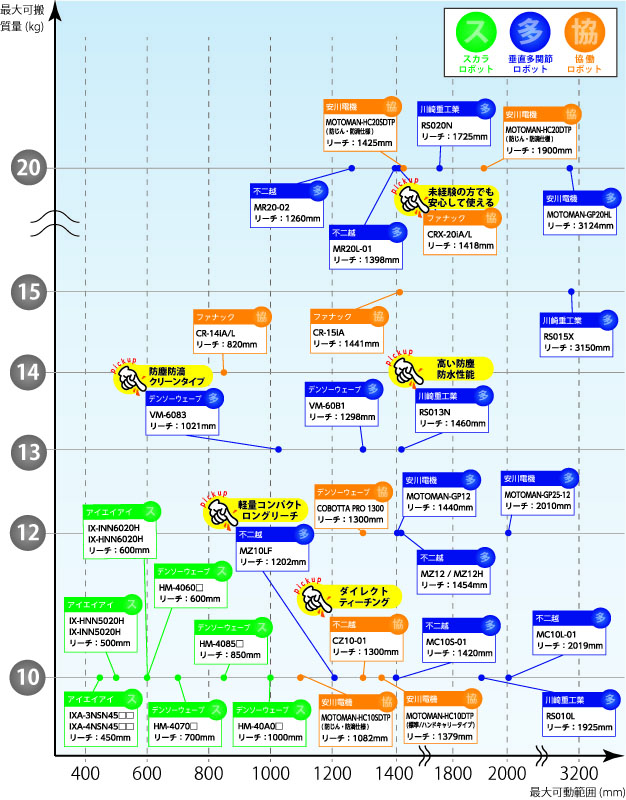
今回は、ロボットの導入を検討されている方々のために、可搬質量10~20kgのロボットを、最大可動範囲、最大可搬質量をベースに一覧でまとめました。
省人・省力化装置、現場のお困りごとなど、ぜひお聞かせ下さい!
ロボットだけでなく、周辺機器もまとめてシステムとしてご提案させて頂きます。
ぜひ下記からお問い合わせ下さい!![]()
≪早見表≫産業用ロボット可搬質量10~20kg
この早見表を掲載したリーフレットをページ下方の「製品のリーフレットはこちら」からダウンロードできます。 ![]()
人協働ロボット
人協働ロボット CRX-20iA/L《ファナック》 “pickup”
苛酷な産業環境における塵や液体の侵入を防ぐ
・塵や液体の浸入を防ぐIP67規格に準拠
・高感度の接触検知と組み合わせた簡単プログラミング
・無人搬送車や手押し台車にも搭載しやすい軽量タイプ
・国際規格ISO10218-1適合の安全認証を取得済み
■仕様
・可搬:2kg
・リーチ:1,418mm
・質量:41kgスリムアーム協働ロボット CZ10 《不二越》 “pickup”
ロボット導入に最適!人にやさしい協働ロボット
・ヒトとの接触で安全停止
・アームを手で動かし、直感的にティーチングが可能
・アームには丸みを持たせた、ヒトにやさしいデザイン
■仕様
・可搬:10kg
・リーチ:1,300mm
・質量:約61kg垂直多関節ロボット
垂直多関節ロボット VM-6083 《デンソーウェーブ》 “pickup”
垂直多関節ロボットの中で最も長いアームリーチ、大きな可搬質量となります
・アーム幅は130㎜とスリムな為、周辺設備との干渉を低減でき、設備の小型化に貢献
・最大可搬質量13kgとパワフルで、重量物もラクラク搬送
(手首下向き±10°を超える場合は11kg)
・ツール用エアー配管(7回路)・電気配線(10芯)、さらには電磁弁も標準装備
・悪環境下でも使用可能な「防塵防滴タイプ」や、クリーンルーム内の自動化に最適な「クリーンタイプ」を品揃え
・ニーズに合わせ、防塵防滴タイプも選択可能
■仕様
・可搬:13kg
・リーチ:1,021mm
・質量:約82kg可搬ロングリーチロボット MZ10LF《不二越》 “pickup”
スリム型10kg可搬ロングリーチロボット
・軽量、スリムなボディで1202mmのロングリーチを実現
・10kg可搬のパワーでハンド設計の自由度を拡大
・クラストップレベルの最高速度
・高い位置繰り返し精度(±0.025mm)により精密な位置決めが可能
・中空手首を通したハンド配線引き回しで、干渉を回避
■仕様
・可搬:10kg
・リーチ1,202mm
・質量:約55kg6軸垂直多関節ロボット RS013N《川崎重工業》 “pickup”
動作性能と高い防塵・防水性能を実現
・防水コネクタを採用、全部位でIP67相当の高い防塵・防水性能を実現
・最新の制振制御を行い、高速動作時も高精度なパフォーマンスを発揮
・旋回軸と前後軸間のオフセットをなくすことで、ロボット下方、背面、
近傍の動作領域も拡大
■仕様
・可搬:13kg
・リーチ:1,460mm
・質量:約170kgお客様の現場の“課題をスッキリ解決”します!
当社では、産業用ロボットの導入を検討されているお客様に対し、豊富な実績と専門知識を持つスタッフがお手伝いいたします。
私たちは、単にロボットの仕様を提示するだけでなく、お客様の現場の課題やニーズに合わせた最適な設備をご提案することを大切にしています。
技術・知見のある専門スタッフが、産業用ロボットの導入をはじめ、先端技術の導入支援からサポートまで幅広くサービスを提供しています。お客様のご要望や現場の状況に合わせて、最適なロボットや周辺機器を組み合わせたシステムをご提案いたします。
お客様の現場の課題解決のために以下のようなアプローチを行っています。
・お客様の業種や製品についての詳細なヒアリング
・現場での課題や改善を望む点の共有
・お客様の予算やスケジュールに合わせた提案
さらに、当社では産業用ロボットだけでなく、周辺機器やシステムも取り扱っております。エンドエフェクタ、ビジョンシステム、センサー、コンベアなど、必要な要素を組み合わせて、お客様に最適なトータルソリューションを提供いたします。
お問い合わせいただく際には、以下の情報をお知らせいただくと、より具体的な提案が可能です
1.お客様の業種や製品についての詳細
2.現場での課題や改善を望む点の具体的な内容
3.お客様の予算やスケジュールの範囲
お気軽にお問い合わせください。私たちはお客様のニーズに合わせた最適な産業用ロボット導入のご支援をいたします。