








従来の軽量・コンパクト・中空手首はそのままに更に高速・高精度化を実現。
【高速】
・世界トップクラスの各軸最高速度はそのままに加速・減速性能の向上によりタクトタイムを従来機より最大約43%短縮
【高精度】
・位置繰り返し精度:ずれ量を従来機比約3/4に低減。
・軌跡精度;ずれ量を従来機比約1/3に低減。
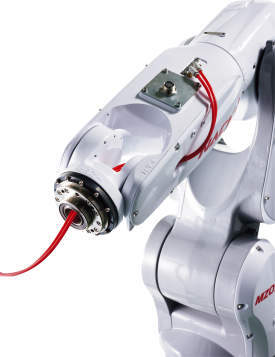
【中空手首構造】
・中空手首を通したハンド配線引き回しで、周辺設備との干渉を回避し、設備レイアウトの小型化を実現します。
共通仕様
| ロボット型式 | MZ07F-01/MZ07LF-01 |
|---|---|
| 構造 | 関節型 |
| 自由度 | 6 |
| 駆動方式 | ACサーボ方式 |
| 可搬質量 | 手首部:7kg |
| 位置繰り返し精度 | MZ07F-01:±0.015mm MZ07LF-01:±0.020mm |
| 最大リーチ | MZ07F-01:723mm MZ07LF-01:912mm |
| エアー配管 | φ6×2 |
| アプリケーション信号線 | 20芯 |
| 設置方法 | 床置/壁掛/傾斜/天吊 |
| 設置条件 | 周囲温度:0~45℃ 周囲湿度:20~85%RH(結露無きこと) 据付面への許容振動:0.5G(4.9m/s2)以下 |
| 耐環境性 | IP67相当(防塵・防滴) |
| クリーン度 | CLASS4 |
| 本体質量 | MZ07F-01:41kg MZ07LF-01:43kg |




