COBOTTA
-
![]()
COBOTTA
-
![]()
かたちもうごきも、安全に。
-
![]()
手の足りない場所に、今すぐに。
-
![]()
覚えずに、教えられる簡単さ。
-
![]()
可能性は無限に、引き出せる。




【人と一緒に働くロボット】どこでも、いますぐ、かんたんに。 みんなと一 緒に働くロボット。
【かたちもうごきも、安全に。】
人と協働する存在として、その基本に求めたこと。それは「人へのやさしさ」です。鋭利な部分をつくらず、ユニークなアーム構造に加え、指を挟み込まないよう可動範囲も配慮。さらに、速度とトルクを監視する6つのセンサーも内蔵し、機能的にも安全です。
【手の足りない場所に、今すぐに。】
コントローラを内蔵しながらも、手軽に持ち運べる約4kg。COBOTTAは、小型・軽量なため、使いたいとき、使いたい場所で、すぐに作業を始められます。手が足りないときはもちろん、アイデアをすぐに実現したいとき、その小さな体が、とても大きな魅力です。
【覚えずに、教えられる簡単さ。】
COBOTTAとの作業に、専門的な知識は必要ありません。
アーム部を直接動かして動作を記憶させる「ダイレクトティーチング機能」をはじめ、直感的に使えるGUIや、カメラを用いたティーチング機能にも対応。これまでロボットになじみがなかった方でも、すぐに使えます。
【可能性は無限に、引き出せる。】
COBOTTAは、内蔵コントローラを開放し、制御用APIを公開しているため、クリエーターが自由な開発環境でオリジナルのアプリケーションを開発できます。JavaやRubyなど様々な開発言語に対応し、接続可能なデバイスも多種多様。プロの要望にも十分に応える拡張性の高さを備えています。
「*COBOTTAは、株式会社デンソーウェ−ブの登録商標です。」
共通仕様
| 最大リーチ | 342.5mm |
|---|---|
| 定格可搬質量 | 0.5kg |
| 軸数 | 6軸(アーム部)+1軸(電動グリッパ部)(オプション) |
| ブレーキ | 1、2、3、4、5軸ブレーキ付 |
| アーム長(第1アーム+第2アーム) | 342.5(165+177.5)mm |
| 定格可搬質量(最大可搬質量) | 0.5kg(手首下向き時±10度以内の場合は0.7kg) (電動グリッパ無しの場合) |
| 最大許容慣性モーメント | J4:0.0065kgm2 J5:0.0040kgm2 J6:0.00025kgm2 |
| 位置繰返し精度 | ±0.05mm(周囲温度一定条件下) |
| 標準サイクルタイム | ・工場出荷時4.32sec ・最大速度設定時1.6sec (水平200mm、垂直25mmの往復動作時間) |
| 保護等級 | IP30 |
| ソフトウェア | 標準版:COBOTTA専用ソフトウェア OSS版:なし(※お客様にてLinuxなどをインストール可能) |
| 電源仕様(ACアダプター) | 入力:単相AC100~240V±10%/47~63Hz |
| 外部信号 | 専用入力:12点/専用出力:10点 汎用入力:8点/汎用出力:10点 外部非常停止用接続×1ch |
| 外部通信 | Ethernet×1回線、USB×2回線、VGA出力×1ch |
| 環境条件(動作時) | 温度0~40℃、湿度20~80%RH(結露なきこと) |
| 本体質量 | 約4kg |
| 安全仕様 | 【標準版】 ISO 10218-1:2011 ISO/TS 15066:2016 ISO 13849-1:2015 PL d Cat.3 【OSS版】 ISO 13849-1:2015 PL d Cat.3 |
-
![産業用ロボット特集]()
このようなお困りごとはありませんか?
■「ロボットのラインナップが多くて何が適しているか分からない」
■「ロボットの操作が不慣れなため導入が難しそう」
■「省人化の為にロボットを導入したいが、スペースがない」
■「ロボットティーチング、プログラミングが出来るか不安」
■「ロボットを導入して生産性が落ちないか不安」省人化に最適な小型・汎用ロボットの選定、お手伝いさせて頂きます!
産業用ロボットは、低価格化や小型化が進んできたことや、協働ロボットが普及してきたこともあり、幅広い分野の工場での導入実績が増えてきました。
今回は、ロボットの導入を検討されている方々のために、省人化しやすい可搬質量4kg未満のロボットをまとめました。
お客様の課題を解決してくれるロボットがきっと見つかります!![]()
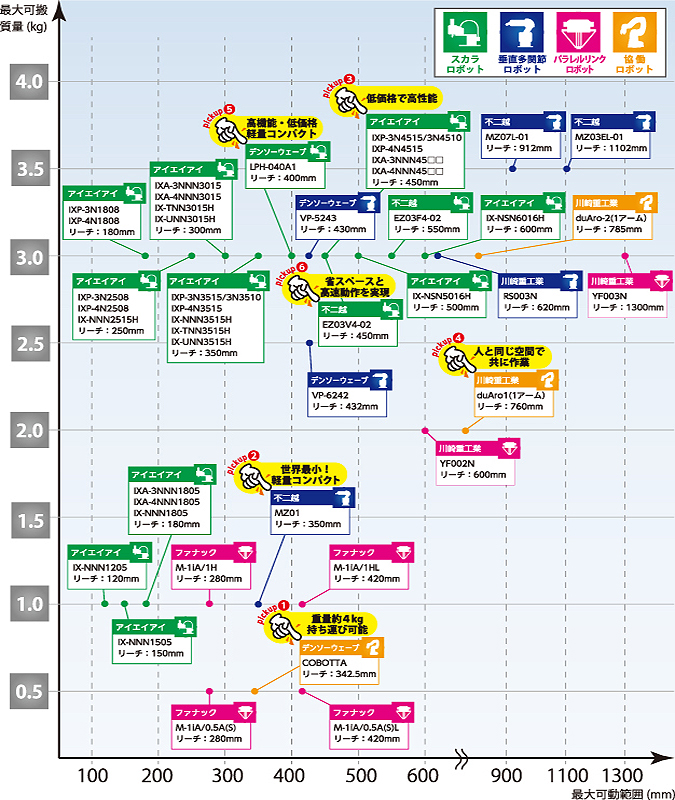
≪早見表≫ 産業用ロボット可搬質量 4kg未満
この早見表を掲載したリーフレットをページ下方の「製品のリーフレットはこちら」からダウンロードできます。 ![]()
人協働ロボット
人協働ロボット COBOTTA 《デンソーウェーブ》 “pickup 1”
驚くほど小型・軽量!人と一緒に働くロボット
・覚えずに、教えられる簡単さ。COBOTTAとの作業に、専門的な知識は必要なし
・安全柵なしで設置可能
・産業用ロボットコントローラ内蔵型で周辺機器に含めた統合制御が可能
・設備制御用PLC購入コスト、IO配線工数、プログラム作成工数、デバック工数低減に貢献
・本体重量約4kgの計量ボディで持ち運びが簡単
・手作業の既存設備に簡単アドオン可能
■仕様
・可搬:0.5kg
・リーチ:342.5mm
・質量:約4kg
・設置方法:床置双腕スカラロボットduAro1 《川崎重工業》 “pickup 4”
人ひとり分の省スペースと広い協調動作範囲を実現
・アームの同時配置とコントローラの小型化による省スペース化
・ダイレクトティーチングと専用タブレットソフトウェアによりロボットを使用したことが無い方でもロボットの教示や操作が可能
・コントローラを内蔵したキャビネットとキャスター付きの台車により、簡単に移動・設置が可能
・動作中に人と接触しても衝突を検知して安全に停止
■仕様
・可搬:2kg
・リーチ:760㎜
・質量:約230kg
・設置方法:床置垂直多関節ロボット
超小型ロボットMZ01 《不二越》 “pickup 2”
作業者ひとり分のスペースに2台設置できる超小型ロボット
・1kg可搬クラスでは世界最小6軸設計
・クラストップレベルの高速・高精度
・アプリケーションを選ばない大きな手首トルク
・スカラロボットを超える自由度
・クリーンルーム内の小型電子部品の組立てに最適
・本体質量が10kgで持ち運べる軽さを実現
■仕様
・可搬:1kg
・リート:350㎜
・質量:10kg
・設置方法:床置、天吊スカラロボット
スカラロボット IXA-4NNN45□□ 《アイエイアイ》 “pickup 3”
トップレベルの動作性能で、様々な工程のサイクルタイム短縮に貢献
・バッテリーレスアブソリュートエンコーダー標準搭載
バッテリー交換作業が不要になり、メンテナンスの工数削減
・コントローラー込みで低価格
・振動が少なくブレない位置決め
・保護等級IP65に対応
・フルカバー構造、稼働部をカバーで覆うことで防塵性を向上
・ダブルアーム構造、剛性向上により振動を低減
■仕様
・可搬:3kg
・リーチ:450mm
・質量:27kg
・設置方法:床置スカラロボット LPHシリーズ 《デンソーウェーブ》 "pickup 5"
高性能・低価格・軽量コンパクトなスカラロボット
・T軸の最大許容慣性モーメントが大きいため、ハンド設計の自由度が高い
・オーバーハングしたハンド形状などにも対応
・設備のトータルコストダウンを実現
・高機能コントローラRC8の機能を使ってロボットと周辺設備を一括制御
・プログラミングの知識がなくてもPLCから制御可能
・立ち上げ調整工数を削減に貢献
■仕様
・可搬:3kg
・リーチ:400mm
・質量:約16kg
・設置方法:床置ウィングスライサー型 EZ03 《不二越》 “pickup 6”
省スペース性と高速性に優れ、多様なニーズに対応
・天吊りと床置き仕様共に、250mmと150mmの上下ストロークをラインナップ
・動作範囲全域での使用が可能で、省スペース化と経路の最適化を実現
・第1軸の上下移動によりアームのコンパクト化を実現
・ロボットアーム部にモータがないためスリムで軽量高速動作が可能
・小さなアームで、広い動作範囲よりコンパクトなレイアウトを実現
・床置スカラ型と比べサイクルタイムを30%短縮可能
■仕様
・可搬:3kg
・リーチ:450、550mm
・質量:約42kg
・設置方法:天吊、床置お客様の現場の“課題をスッキリ解決”します!
当社では、産業用ロボットの導入を検討されているお客様に対し、豊富な実績と専門知識を持つスタッフがお手伝いいたします。
私たちは、単にロボットの仕様を提示するだけでなく、お客様の現場の課題やニーズに合わせた最適な設備をご提案することを大切にしています。
技術・知見のある専門スタッフが、産業用ロボットの導入をはじめ、先端技術の導入支援からサポートまで幅広くサービスを提供しています。お客様のご要望や現場の状況に合わせて、最適なロボットや周辺機器を組み合わせたシステムをご提案いたします。
お客様の現場の課題解決のために以下のようなアプローチを行っています。
・お客様の業種や製品についての詳細なヒアリング
・現場での課題や改善を望む点の共有
・お客様の予算やスケジュールに合わせた提案
さらに、当社では産業用ロボットだけでなく、周辺機器やシステムも取り扱っております。エンドエフェクタ、ビジョンシステム、センサー、コンベアなど、必要な要素を組み合わせて、お客様に最適なトータルソリューションを提供いたします。
お問い合わせいただく際には、以下の情報をお知らせいただくと、より具体的な提案が可能です
1.お客様の業種や製品についての詳細
2.現場での課題や改善を望む点の具体的な内容
3.お客様の予算やスケジュールの範囲
お気軽にお問い合わせください。私たちはお客様のニーズに合わせた最適な産業用ロボット導入のご支援をいたします。